


斯年智驾何贝:商用车的本质是生产工具,智能驾驶必须算好这笔账
在智能电动汽车发展高层论坛(2026)上,斯年智驾创始人兼董事长何贝分享了一个贯穿十年的思考:商用车和乘用车的智能驾驶,底层逻辑完全不同。

乘用车是消费品,无人驾驶是增值服务、辅助工具。商用车是生产工具,必须通过改变生产关系来促进生产力发展。降本增效,是整件事的核心。
何贝的团队从2013年起在百度做无人驾驶,2017年出来创业,至今已在行业深耕十年。截至目前,斯年智驾已累计卖出550辆智能重卡,其中在集装箱港口领域部署了280辆真正的无人驾驶车辆,而非有人驾驶。
降本增效:客户买单的三个理由
客户为什么会为智能驾驶买单?何贝总结为三个核心诉求。
第一,钱。 物流公司老板的核心诉求是尽快回本、利润越来越多。智能驾驶必须算得过来这笔账。
第二,安全。 无人驾驶能提升安全性,降低事故率。没有人,财损、货损、人亡概率自然下降;没有人,偷油、耗电等损耗也随之消失。
第三,效率。 无人车不需要吃喝拉撒,不需要休假请假,可以一直干活。单位时间内干的活最多,或者压根不需要停歇,这就是增效的本质。
何贝认为,走到今天,智能重卡已经只有一种形态——所有不同类型的车都可以做降维和修改。五年前没人敢说这话,因为那时谁也不知道雷达会不会便宜、域控到底要多少算力、线控冗余怎么做。整个行业是“卷出来的”,一边做一边试。
技术路线:两段式端到端,兼顾安全与成本
在算法层面,乘用车圈流行的端到端大模型,商用车烧不起。
何贝算了一笔账:乘用车想要训出一个比较好的端到端模型,至少需要300万Clips,加上标注成本、标注时间、算力平台电费,一年需要几个亿。商用车承受不了这个成本。
斯年的做法是把模型切开,采用两段式端到端。这样做有几个好处:降低标注成本和运维时间;通过解耦插入更多安全策略;用云端千卡集群和足够的场景库,完成轻量化模型适配,兼顾L4开放场景、封闭场景和NOA。
在地图层面,斯年选择轻图、无图路线。高精地图除了制作麻烦,运维更麻烦——更新频率永远跟不上道路实际变化。客户的车开到哪儿根本不知道,如何快速适配?这是无图和轻图的宿命。
目前,斯年智驾的算法体系涵盖三种传感器(相机、激光、毫米波)。不同场景选择相应传感器即可:干线开放场景需要看得远、看得稠密;封闭L4场景需要补盲;NOA场景则通过降低成本来约束传感器数量。算力平台也相应裁减。
从大B到小B:商业模式决定成败
商用车客户分大B和小B。大B群体少,但每个案例体量大,适合做样板间,特点是薄利多销、利润薄。小B数量可能是大B的百倍、千倍、万倍,分散度高,话语权更强、利润更高,但筛选和服务的难度大。
如何赚大B的钱?不能只卖重卡。斯年卖的是体系化服务:重卡+智能驾驶+云端系统+充电换电基础设施+路侧设备。与主机厂合作,提供整体EPC解决方案。
如何赚小B的钱?采用大车队集中管理运营模式。集中采购可以谈更低的电价、电池价、车价;集中管理才能摊平远程监控成本——如果每个老板只卖一辆无人车,远程放一个人看一辆车,L4的经济性就无从谈起。
何贝认为,模式不重要,客户最重要。销售和运营本质上是一回事:销售只不过是把运营的钱一次性收清了,运营只不过是把销售的钱按月摊销而已。
从封闭到开放:三维演进路径
斯年的发展遵循一条清晰的逻辑:集装箱港口是起点,因为最简单——大B客户、足够封闭、路权清晰、场景标准。
做完集装箱港口后,货种从集装箱拓展到干货、散货、化工、液体、铝、铁等;场景从港口拓展到钢厂、冶金厂、口岸、铁路场站、干线物流。单一场景到多场景的变化,是行业发展的第一维。
从大B向更多中B、小B发展,是第二维。样板间已经树立,规模复制开始。
从封闭到开放,是第三维。何贝判断,路权问题在未来五年会大规模松动,这一趋势从去年开始已经显现。
截至目前,斯年除了港口内的280辆真无人车外,在其他场景(公铁、海铁、陆路、公路等多式联运,以及散货场站、园区、口岸、长距离干线等)还部署了270辆智能重卡,一半为运营模式,一半为销售模式。
从百度到创业,从港口到干线,从大B到小B,从封闭到开放——斯年智驾的十年,也是中国商用车智能驾驶从0到1、从1到N的缩影。何贝说:“我们只是希望对这个行业和科技发展尽一份力所能及的作用。”
而这份“力所能及”,已经跑在了550辆智能重卡的前方。
热门资讯
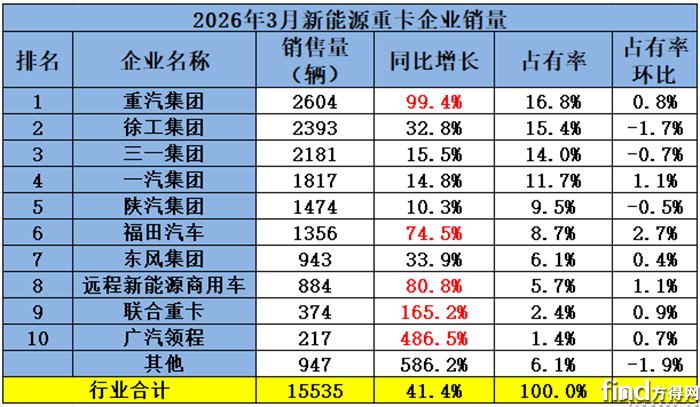 重汽/徐工争第一 联卡涨165% 黑马暴涨487%!新能源重卡3月涨41%方得网2026-04-07
重汽/徐工争第一 联卡涨165% 黑马暴涨487%!新能源重卡3月涨41%方得网2026-04-07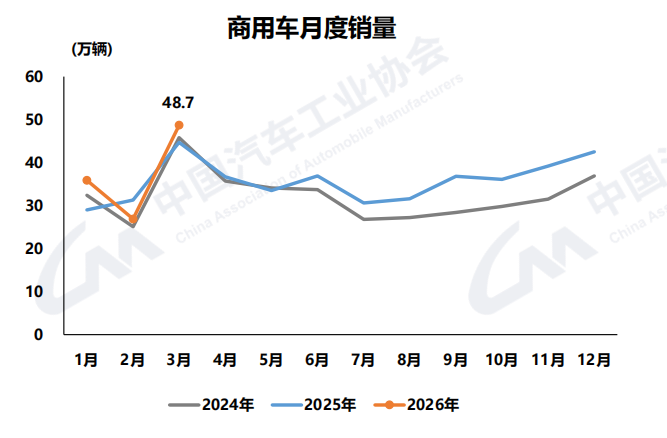 重卡涨25% 出口涨超31%!商用车3月销50万辆 新能源涨22%方得网2026-04-10
重卡涨25% 出口涨超31%!商用车3月销50万辆 新能源涨22%方得网2026-04-10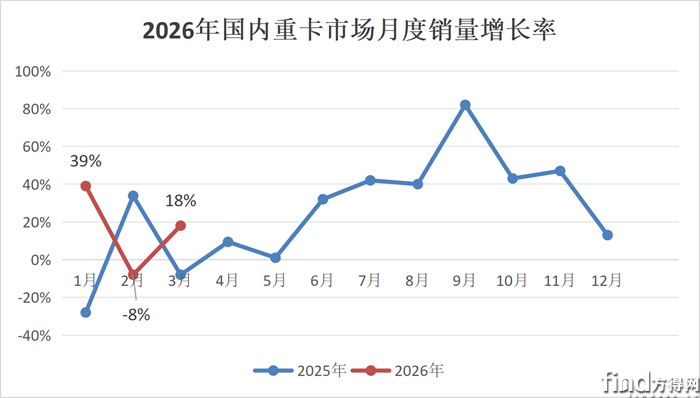 重汽超3万 解放涨28% 福田涨30% 徐工暴增46%!重卡3月涨近20%方得网2026-04-08
重汽超3万 解放涨28% 福田涨30% 徐工暴增46%!重卡3月涨近20%方得网2026-04-08 广汽领程与鸭嘴兽举行战略合作暨1000台港口牵引车签约广汽领程2026-04-09
广汽领程与鸭嘴兽举行战略合作暨1000台港口牵引车签约广汽领程2026-04-09 经销商揭内幕:电动重卡“车电分离”模式,是陷阱吗?方得网2026-04-10
经销商揭内幕:电动重卡“车电分离”模式,是陷阱吗?方得网2026-04-10

数据
更多>- 重汽/徐工争第一 联卡涨165% 黑马暴涨487%!新能源重卡3月涨41%
- 远程力压五菱夺冠!上汽/江铃份额增8%!新能源轻客2月跌55% 如何解读?
- 长城断崖式领跑 郑州日产独增23%!2月皮卡销超1.5万辆
- 新能源小微卡2月前十大变!远程继续领跑 菱势杀进前五 比亚迪逆增75倍
- 徐工第一 它领涨107% 东风/福田逆增!新能源重卡2月销车7435辆
- 跃进夺冠 庆铃进前三 重汽逆增12%!2月新能源轻卡降23%
- 前2月柴油机增9.2% 潍柴16万台 全柴稳前三 东风康明斯领涨15%
- 福田第一 江淮第二 江铃唯一正增长 2月轻卡降23%
- 重汽超2万第一 解放/陕汽居前三 福田/徐工逆增!重卡2月前十放榜
- 客车出口2月大涨7成!宇通大增100% 金龙夺冠 中通前三!安凯公交涨疯了
原创
更多>- 徐工新能源重卡率先“通关”超1000公里长途!
- 暴增615%!广汽领程新能源重卡追上来了!
- 潍柴投“王炸”!4.0 Pro燃气机发布!气耗再降多少?
- 都在抢新能源市场 法士特悄悄把市占率拉满了
- #三一重卡梁林河:4年内学会造无人重卡!@三一集团
- 经销商揭内幕:电动重卡“车电分离”模式,是陷阱吗?
- 只造挣钱车!新一代长安睿行EV为用户“升级”赚钱能力而来
- 欧康动力一季度销量破纪录!2026年或撞线20万台!凭啥?
- 上汽大通刘海群:皮卡“卷王”的底层逻辑,是回归用户价值本真
- 重汽/徐工争第一 联卡涨165% 黑马暴涨487%!新能源重卡3月涨41%
微信关注

Copyright@2008-2021 方得网find800.cn版权所有 转载请注明来源方得网
